[CVPR 2021] Energy-Based Learning for Scene Graph Generation
Energy-Based Learning for Scene Graph Generation
1. Problem Definition
Scene Graph Generation(SGG) in Computer Vision
Scene Graph Generation은 이미지가 주어졌을 때 Scene Graph로 변환하는 Task를 의미한다. 예를 들어, 왼쪽의 이미지가 주어졌을 때 오른쪽 그림과 같은 Graph로 만드는 것이다. Graph의 Node은 Entity(e.g.사람, 돌)을 의미하고 Edge의 경우에는 두 Node 사이의 Edge는 Entity 사이의 Predicate(술어)를 의미한다. “사람이 돌 위에 있다“라고 한다면 Node는 “사람”, “돌“이 될 것이고 Edge(Predicate)은 “standing on(위에 서 있다)“가 될 것이다.
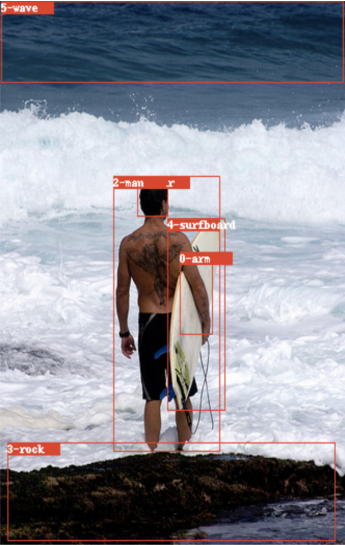
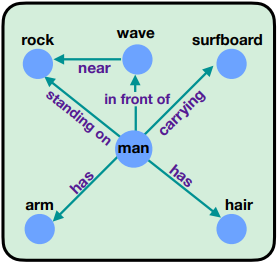
그림 출처: [CVPR 21]Energy-Based Learning For Scene Graph Generation
2. Motivation
이전 Scene Graph Generation의 모델들은 Relation을 분류하기 위해서 Cross-Entropy Loss를 사용했다. 하지만 Cross-Entropy Loss (CE)를 사용하게 된다면 독립적으로 그 관계만 맞추려고 학습할 것이다. 예를 들면, CE loss를 이용했을 때 위의 그림을 참고하면 <man, on, rock>, <man, holding, surfboard>의 관계가 주어져 있을 때 <man, riding, wave>으로 예측하는 것은 말이 안되지만 독립적으로 man과 wave만을 보기 때문에 riding으로 예측한다.
이 논문에서는 두 객체를 보고 독립적으로 예측하는 것보다는 주변의 다른 관계까지 고려하면서 loss를 학습해야 한다고 주장한다. 예를 들면, loss를 학습할 때 위의 그림에서 <man, carrying, surfboard>를 고려한다면 <man, riding, wave>이 오는 것은 common sense로 봐도 말이 안되기 때문에 큰 Penalty를 부여하여 <man, riding, wave>가 못 나오도록 학습하게 하는 것이다.
Discriminative Idea
이 논문에서는 CE Loss를 활용해서 두 객체만을 고려했을 때 예측하는 것보다는 Output space에서 고려하는 Energy-Based loss를 제안한다. 여기서 Input space를 고려하는 것을 CE Loss라고 봤을 때, Output space는 이미지에서 Global하게 주변의 다른 관계까지 고려하는 것을 의미하고 이를 Energy-Based Model를 활용하여 학습한다.
3. Method
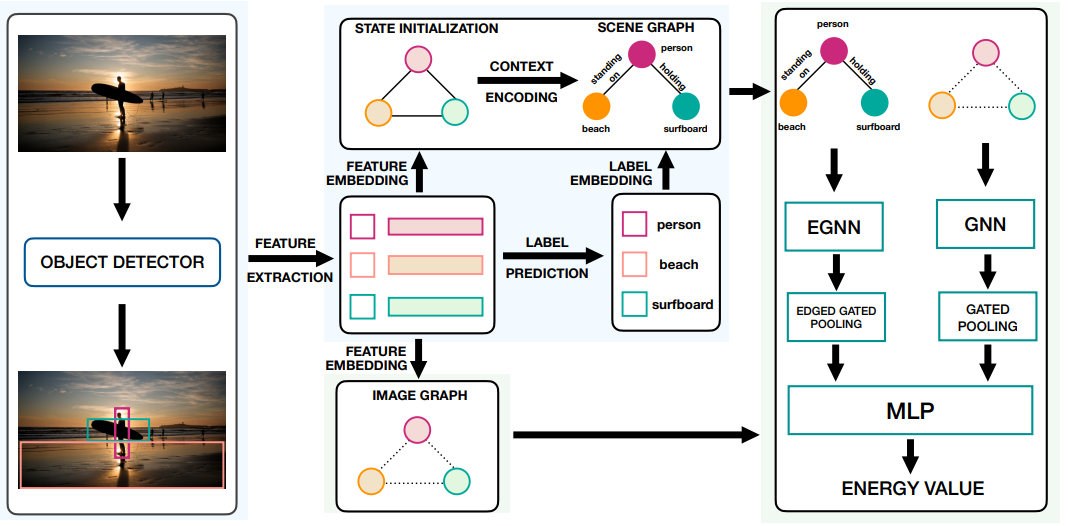
Overall Framework 사진은 아래와 같다.
1. Object Detection
Overall Framework의 맨 왼쪽의 그림을 보면 이미지가 주어져 있을 때, 객체를 탐지한다. Scene Graph Generation에서는 Fair Comparison을 위해서 Faster-RCNN을 주로 활용한다. Faster R-CNN을 통해서 사람과 서핑보드 등의 객체를 먼저 탐지하게 된다. Faster R-CNN을 통과하면 객체마다 Visual Feature, Object Class, Bounding Box 정보를 추출하게 된다.
2. Context 반영
Faster R-CNN을 통해서 객체에서 Visual Feature를 탐지하고 나면 Overall Framework에서 Feature Extraction을 통과한다. 그리고 Context 반영을 하고 Feature를 Refinement하기 위해서 Bi-LSTM, Bi-Tree LSTM을 활용한다. Scene Graph에서는 주변의 Context 반영을 하고 Refinement된 Feature를 활용하는 것이 중요하기 때문에 이 논문에서도 Visual Feature를 그대로 사용하는 것이 아니라 Refinement를 한다.
Context 반영은 Scene Graph Generation task에서 핵심적으로 다루어지고 있는데, 이 논문은 Context 고도화의 목적이 아니기 때문에 다른 Context 반영 방법을 그대로 사용한다.
3. Energy-Based Loss 사용
Energy-Based Loss를 사용해서 Motivation에서 언급했듯이 다른 주변의 관계까지 고려하면서 Output Space에서 학습하도록 한다. 다시 말하자면 CE Loss는 독립적으로 두 객체만을 보고 관계를 예측한다면 Energy-Based Loss는 이미지 내에서 다른 객체들의 관계를 고려하면서 학습하는 것이다.
Notation을 먼저 설명하면, 2번에서 얘기한 Context Encoding을 하고나면 Entity와 Relation을 예측한 Scene Graph형태로 나오게 된다. Overall Framework에서 맨 위에 있는 Scene Graph를 보면 이해가 더 쉽다. 해당 Scene Graph를 라고 하자.
Overall Framework에서 맨 아래를 보면 Image Graph가 존재하는데 이는 처음에 Faster R-CNN으로 나온 Feature로 initialize되어 있는 Entity가 존재하게 된다. 이 때는 Entity 둘 관계를 예측하지 않고 Entity만 존재하는 Graph로 보면 된다. 이를 라고 하자. Scene Graph와 Image Graph의 큰 차이는 객체 사이에 관계까지 고려한 그래프면 전자, 객체로만 표현되어 있는 그래프는 후자이다.
그리고 Ground-Truth Bounding Box를 통해서 만든 Image Graph를 라고 하고, Ground-Truth Scene Graph를
라고 하자.
위가 Energy-Based Loss인데 설명하면 다음과 같다. Ground-Truth를 이용했을 때 Graph의 Energy (앞의 Term)와 예측했을 Graph의 Energy (뒤의 Term)을 가깝게 하는 것이다. 는 Ground Truth의 Image Graph와 Ground Truth의 Scene Graph를 이용했을 때의 Energy이다. 이를 예측한 Graph의 Energy
를 가깝게 하면, Scene Graph를 예측할 때 Ground-Truth의 Energy하고 가깝게 학습될 것이다.
이렇게 학습을 하면 CE Loss처럼 독립적으로 두 Entity를 보고 학습하는 것이 아니라 Image에 있는 다른 관계까지 고려하면서 학습을 하게 되는 것이다. 즉 Output Space에서 학습하는 것이다.
이 논문에서는 위를 바로 학습을 하게 된다면 Gradient Overflow가 생기게 될 수 있는데 이를 방지하기 위해서
\(L_r=E_{\theta}(G_{I}^+,G_{SG}^+)^2+E_{\theta}(G_{I},G_{SG})^2\)
Loss를 이용해서 Gradient Overflow를 방지한다.
최종 Loss는
\[L_{total}=\lambda_e L_e+\lambda_r L_r + \lambda_t L_t\]로 구성된다. 는 CE Loss로 사용되지만 이는 Regularizor로써만 활용된다.
Energy Based 구현
Scene Graph와 Image Graph의 Energy를 계산하기 위해서는 해당 논문에서는 Scene Graph와 Image Graph를 각각 Graph Pooling을 한 후, Pooling한 Representation을 Concat한 후, MLP를 이용하여 하나의 Scalar를 추출하게 된다. 다시 정리하면 Ground-Truth Scene Graph와 Image Graph를 활용하여 Pooling한 후, MLP를 이용하면 Ground-Truth의 Energy value인 Scalar가 나올 것이고, Predicted Scene Graph와 Image Graph에서도 하나의 Predicted Energy Scalar가 나올 것이다. Predicted Energy와 GT Energy를 가깝게하여 Image Graph와 Scene Graph 차원에서 Ground-Truth의 Energy를 따라가도록 모델을 학습 하는 것이다.
4. Experiment
Task
- Predicate Classification (PredCls): Bounding Box와 Entity의 Class정보까지 Ground-Truth로 주어졌을 때 Relation만 예측하는 Task
- Scene Graph Classification (SGCls): Bounding Box만 주어져 있고 Entity Class와 Relation을 예측하는 Task
- Scene Graph Detection (SGDet): Image만 주어져 있을 때, Proposal만을 활용해서 Entity Class와 Relation을 예측해야 하는 Task
Main Table
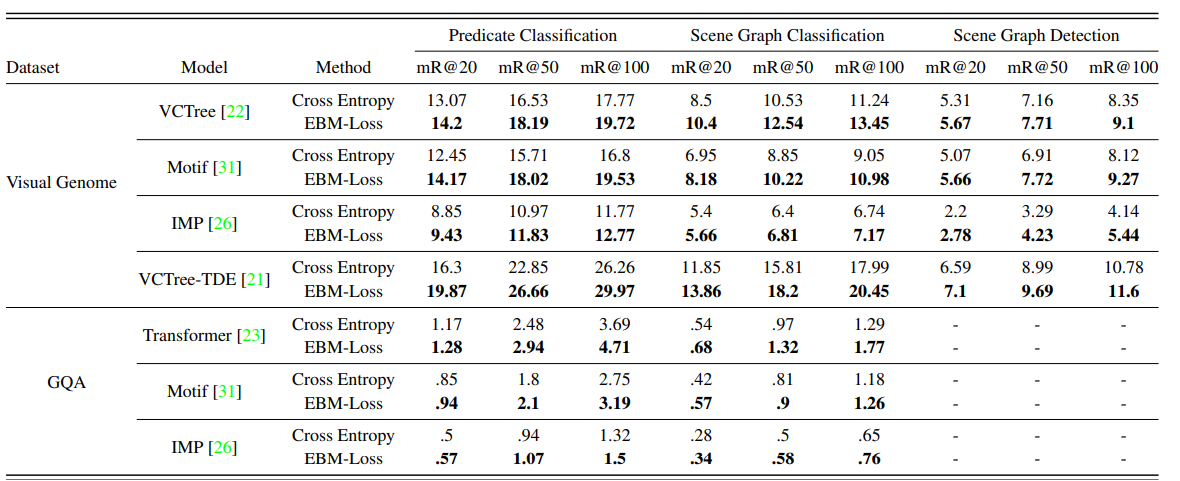
Main Table에서 볼 수 있듯이 Energy-Based Loss를 활용했을 때 성능이 올라간 것을 볼 수 있다. 이 논문에서는 기존의 Model들이 CE Loss를 활용하는데 여기에서는 그 Loss를 Energy-Based Loss를 이용했을 때 성능 변화를 보여준다.
Qualitative Results
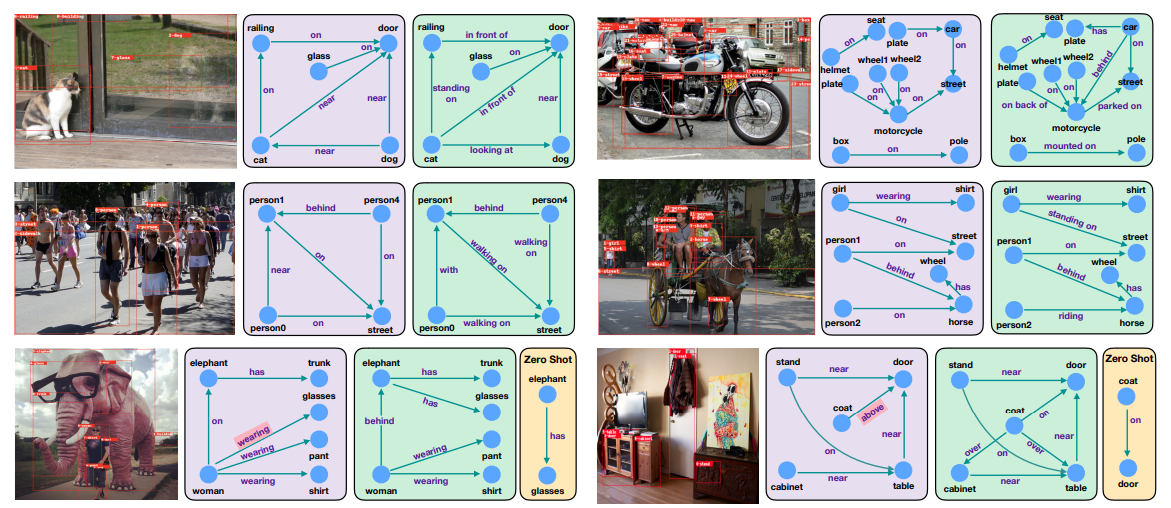
이 실험은 실제로 CE Loss를 썼을 때와 Energy-Based Loss를 활용했을 때 어떻게 예측했는지를 보여준다. 이 논문에서는 CE Loss보다 Energy-Based Loss를 사용했을 때 더 말이 되는 관계를 예측했음을 실제로 보여주고 더 Fine-Grained한 관계를 예측했다는 것을 보여준다. 예를 들면, 첫 번째 고양이 사진의 경우에 해당 논문은 <cat, in front of, door>로 예측하고, CE Loss를 사용했을 경우에는 <cat, near, door>, <cat, looking at, dog>로 예측했다. 해당 모델이 공간적 정보를 더 세분화되게 예측하는 것을 볼 수 있다. (near vs in front of)
5. Conclusion
기존의 Model들이 CE Loss를 주로 활용했는데 CE Loss는 두 Entity를 보고 예측을 하게 된다. 하지만, 이렇게 되면 Motivation에서 밝혔듯이 주변 관계를 고려했을 때 말이 안되는 관계를 예측하게 된다. 따라서 전체적인 관계를 고려하면서 학습해야함을 주장하고 이를 실험적으로 잘 보여줬다고 생각한다.
Energy-Based Model은 기존에 존재하던 방법론인데 이를 Scene Graph에 적절한 Limitation을 찾고 적용했다고 생각한다. 연구를 할 때 위와 같이 한계점을 찾아내고 기존에 존재하던 방법론을 작 적용하여 해결하는 것이 좋은 연구 방향 중 하나라고 생각한다.
Author Information
- 김기범
- Affiliation : KAIST
- Research Topic: Graph Neural Network, Recommendation System, Scene Graph
- Github Implementation
Implementation